We are at the cusp of transitioning from “learning from data” to “learning what data to learn from” as the central focus of AI research. State-of-the-art deep learning models, like GPT‑[X] and Stable Diffusion, have been described as data sponges,[1] capable of modeling immense amounts of data.[2,3] These large generative models, many based on the transformer architecture, can model massive datasets, learning to produce images, video, audio, code, and data in many other domains at a quality that begins to rival that of samples authored by human experts. Growing evidence suggests the generality of such large models is significantly limited by the quality of the training data. Despite the large impact of the training data on model performance, mainstream training practices are not inherently data-seeking. Instead, they ignore the quality of information within the training data in favor of maximizing data quantity. This discrepancy hints at a likely shift in research trends toward a stronger focus on data collection and generation as a principal means to improve model performance.
The problem of collecting informative data for a model is, in essence, exploration—a universal aspect of learning. In open-ended domains like the real world, where the set of possible tasks of interest is effectively unbounded, exploration is essential for collecting additional data most appropriate for learning new tasks and improving performance on those already learned. Such open-ended learning is perhaps the most important problem setting for machine learning (ML) systems, because the real world, where they are deployed, is exactly such an open-ended domain. Actively acquiring the right data to train on at the right time is a critical aspect of intelligence that allows learning to progress efficiently—in other words, it allows for “learning to walk before you run.” So why is the concept of exploration largely missing in the recent discourse around training more general models?
One reason for this oversight may be that exploration, as typically studied in reinforcement learning (RL) and supervised learning (SL)—where it appears as some variation of active learning—is primarily designed with a static, predefined dataset or simulator in mind. Just as research in SL primarily focuses on optimizing performance on static benchmarks like ImageNet, RL mainly focuses on the setting of a static simulator of a task. This focus on static benchmarks makes the existing notions of exploration unsuitable for learning in open-ended domains like the real world, where the set of relevant tasks is unbounded and cannot be modeled as a static, predefined data generator.
In a recent position paper, my co-authors, Tim Rocktäschel and Edward Grefenstette, and I discuss the idea of generalized exploration. Rather than constrain exploration to the data that can be sampled from a predefined simulator or static dataset, generalized exploration seeks to explore the space of all possible training data for those samples most useful for increasing the capabilities of the learning agent. For example, in the case of RL, this entails searching over the space of possible training environments, and in the case of SL, an expressive parameterization of the data space, e.g. the latent space of a generative model for the data space. This more general perspective on exploration connects the concepts of exploration between SL and RL. Importantly, it also describes how exploration can be applied to fully open-ended domains, where exploration serves as the critical data-gathering process for open-ended learning of an increasingly broad set of abilities.
Such open-ended exploration processes can be expected to serve as a key component in driving progress toward more generally intelligent models. As large-scale model training continues to exploit the benefits of ever larger datasets, researchers have projected that the rate of growth of training datasets may soon outstrip the organic growth of high-quality data on the web—by as soon as 2025. Moreover, larger datasets require more costly compute for training. Recent work has shown that focusing training on only the highest quality data can make learning drastically more efficient, leading to more accurate models at a fraction of the compute cost. Such industrial data dynamics make it clear that open-ended exploration processes, which enable a learning system to autonomously collect or generate new training data for itself, can be expected to play an important role in ML research. Over the next several years, considerable research investment will likely shift away from model design and optimization and instead, turn toward the design of exploration objectives and data-generation processes. Many recent research initiatives, discussed throughout this article, make it clear that such a shift is already underway.
The high-level idea of an ML system that generates its own training tasks (and thus data) is of course not new. This idea has been described to various degrees by Schmidhuber as “artificial curiosity”, and by Clune as an “AI-generating AI.” Here, we seek to motivate the perspective that now is a pivotal time for these ideas to gain traction in practical, real-world ML systems.
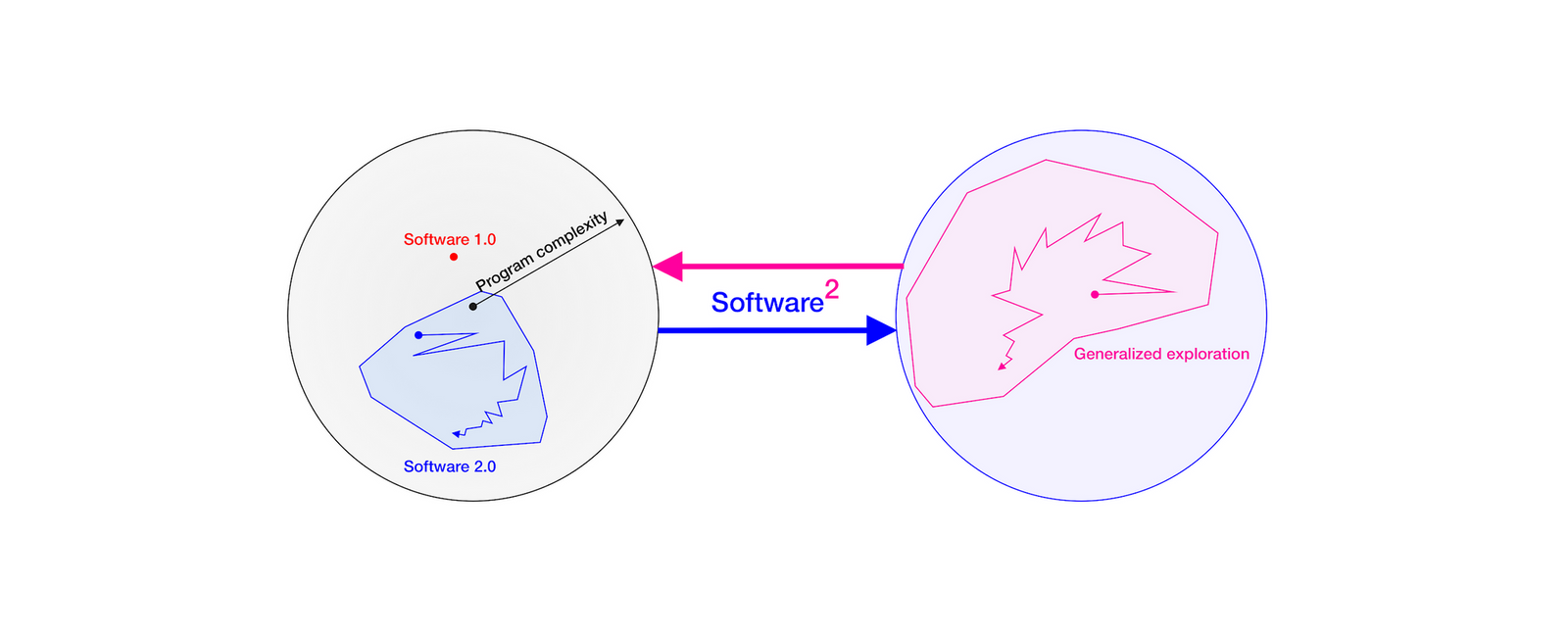
If deep learning can be described as “Software 2.0”—software that programs itself based on example inputs/output pairs—then this promising data-centric paradigm, in which software effectively improves itself by searching for its own training data, can be described as a kind of “Software²”. This paradigm inherits the benefits of Software 2.0 while improving on its core, data-bound weaknesses: While deep learning (Software 2.0) requires the programmer to manually provide training data for each new task, Software² recasts data as software that searches and models the world to produce its own, potentially unlimited, training tasks and data.
The rest of this article provides a quick tour of the motivations and principles behind Software². A more detailed discussion on these ideas can be found in our recent position piece, “General Intelligence Requires Rethinking Exploration.”
A general intelligence?
Deep learning reframes programming as optimization: Rather than coding a sequence of instructions to perform a particular task, simply define an objective function measuring success at that task and use it to optimize a deep neural network (DNN) to do the task for you. This perspective was clearly laid out in Andrej Karpathy’s essay “Software 2.0” in 2017. A major benefit of this approach is that directly searching over the space of programs that can be encoded in the weights of a large DNN can result in solutions to complex problems beyond what a human programmer can manually code up. Just imagine the difficulty of writing a program by hand to caption an image or the opposite, to go from any text description to a matching image.
It may be an understatement to say that since the publication of “Software 2.0,” deep learning has advanced greatly. Most remarkably, we have since found that trained DNNs do not only excel at the specific tasks on which they were trained, but also frequently become more generally capable, learning to succeed at tasks beyond those they saw during training.
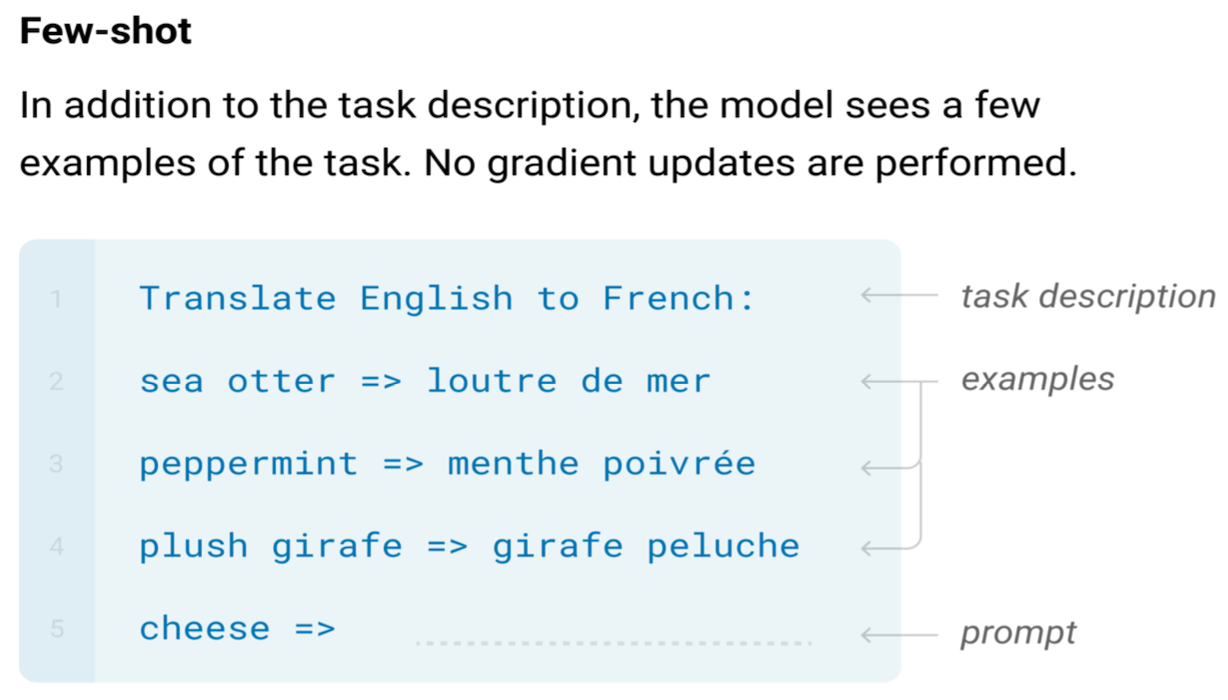
The high-fidelity generation of data in formats like text and video—which can encode detailed descriptions of nearly any task of interest—illustrates how a DNN can become proficient in a wide range of tasks despite training on a single task objective: Learning to predict the next token in samples from an Internet-scale text corpus necessarily requires the model to learn the structure of many kinds of text content, which will naturally include categories of text corresponding to different tasks like translation, answering questions, summarizing, writing code, or even explaining jokes. Recent work takes this idea further, by representing a variety of tasks—including language modeling, multi-modal question answering, and controlling simulated and embodied agents—as a sequence modeling problem. By training a single large model to generate such sequences piece by piece, the resulting model can learn to perform these tasks by simply autocompleting the rest of the sequence from some initial starting segment that sets the scene for the task of interest (often referred to as a context or prompt).
A natural question, then, is whether such deep learning approaches can produce a generally intelligent model—for example, one capable of at least performing any task its human beneficiaries might want to perform themselves. Answering this question is challenging, partly because most definitions of “general intelligence” are vague or unquantifiable. To get a better handle on this question, we choose to instead consider general intelligence in relative terms: Model A is more general than model B in domain D if A is capable of exceeding B on at least one task in D, while matching B in all others—that is, if A’s performance strictly dominates that of B’s across all tasks in D. From this perspective, general intelligence is not a fixed property, but one that can continually change over time for a given task domain, relative to other intelligences. We then use the term increasingly general intelligence (IGI) to refer to a system exhibiting continual improvement in its relative general intelligence with respect to other non-learning agents, including previous versions of itself. This definition of course assumes the task domain is rich enough to support this kind of continual improvement. In this sense, we say an IGI performs open-ended learning, and call its associated process for collecting training data open-ended exploration. This view of general intelligence makes clear that a system that does not perform continual, open-ended exploration cannot, by definition, be an IGI.
Open-Ended Exploration
Without a process for continually seeking new, informative training data, the model’s learning will plateau. Exploration methods in RL and SL directly prioritize the collection of such data, based on proxies for the learning potential of the data, commonly estimated by many means, including by a measure of novelty with respect to past training datapoints; the model’s epistemic uncertainty; or how much the model’s predictions change after training on that data. However, exploration methods in RL and SL largely focus on collecting informative samples in a single, static, predefined simulator or dataset. Static data sources are poor reflections of the infinite and ever-changing nature of the real world. Exploring beyond the confines of such static data generators requires rethinking exploration. The framework of generalized exploration presents a promising path forward.
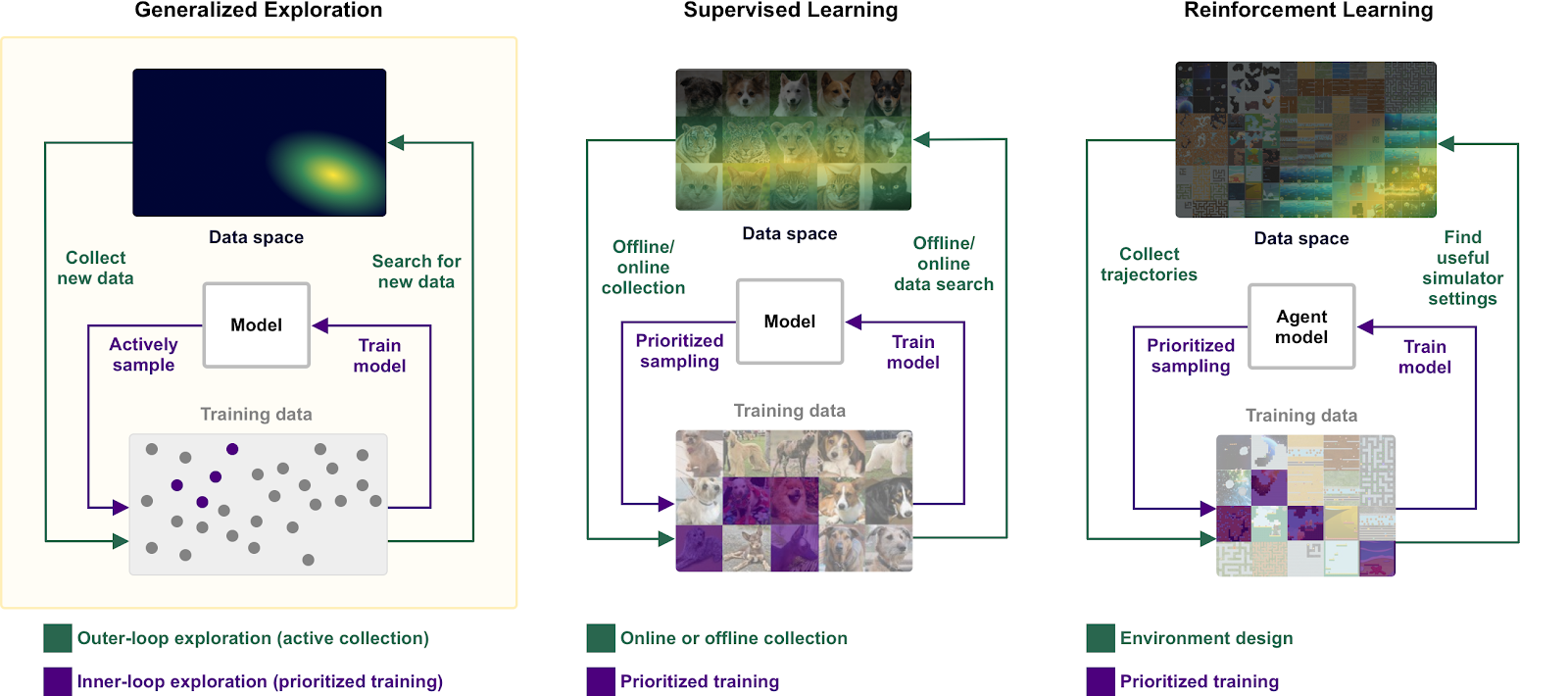
Unlike existing notions of exploration in RL and SL (where it takes the form of active learning), generalized exploration seeks the most informative samples from the full data space. In general, the full data space can be unbounded and cannot be captured by a single, predefined dataset or simulator. In these cases, we have to continually collect more data from outside of the dataset or simulator to gradually expand its scope, performing a kind of bootstrap process. For example, a typical RL agent can experience transitions for a particular game in a procedurally-generated environment, but it is unable to explore the full space of possible transitions across all possible games. Generalized exploration would instead explore the space of transitions possible across all games, rather than just those from a finite number of games. When the data space being explored is unbounded, this process performs open-ended exploration by coupling data collection to the agent model, progressively searching over transitions in which the current agent model experiences the most learning progress.
How can we explore the full data space? We need to parameterize the search space over all possibly useful data and specify a search criteria to guide exploration in this space. A natural search space is that of all mutually-consistent data-generating programs—in the sense the input-output pairs they produce should not contradict each other.,[4] Exploration can then search this space for programs that produce data with the highest learning potential for the current model. Such programs might correspond to a static dataset, a data distribution, or a simulator for a category of tasks. However, learning potential will likely be insufficient as the sole exploration criterion. Also important is data diversity, as there may be many parts of the data space that offer high learning potential. Moreover, there are likely large regions of the data space that are irrelevant to any real tasks of interest, so it may be important to constrain the exploration to be close to the kinds of tasks we care about. Such constraints serve to ground open-ended exploration to more realistic tasks. However, they can also prevent the learning system from exploring potentially important tasks that look unlike any task of practical value, but that nevertheless act as stepping stones for mastering more challenging tasks that are useful. How much prior world knowledge should be used to constrain exploration is thus an important open question.
Of course, we still need some way to actually search through the space of all data-generating programs. In practice, we as the system designers can manually define the high-level specification of programs of interest, such that they are grounded to the invariant features of reality that we care about, but broad enough to encompass a rich, open-ended space of tasks. Such programs might incorporate hooks into the real world via an API or human intervention, allowing them to output both real and synthetic data. A related approach might be to search the latent space of a generative model of the data space to produce new data that maximizes the learning potential of the model. Should learning begin to plateau, we can intervene by evolving the specification, perhaps with the assistance of a model-in-the-loop that updates the spec in directions predicted to provide data with greater learning potential. In a sense, the research community’s continual, collective invention of new benchmarks plays the role of such a continual search over data-generating programs. Recent works like BIGBench, a benchmark composed of a growing set of human-specified benchmarks, directly reflects this pattern. Similarly, Dynabench uses humans-in-the-loop to continually generate new, challenging data for the current model.
Data as Software
By viewing data as a kind of generative software, Software² echoes the Von Neumann computer architecture, in which program instructions and data were both stored equivalently in memory. In the Von Neumann architecture, software at rest is equivalent to data. In Software², data at play is equivalent to software. The ability of Software² programs to continually self-improve makes them an important component to realizing systems demonstrating IGI. Given the now well-acknowledged importance of high-quality training data—which, as mentioned previously, is predicted to grow increasingly scarce—there will likely be much investment in developing different kinds of Software² systems. Much research focus can be expected to shift from designing and optimizing models to designing and optimizing processes that generate training data for such models. Key components of the Software² stack are already being actively developed across many areas of ML research:
Automatic curriculum learning: In both SL and RL, automatic curriculum learning methods directly search for datapoints or simulator configurations that maximize an agent’s learning potential. Such methods, including recent methods for environment design, form the core component of generalized exploration, given an appropriate parameterization of the data space, like a rich simulator, world model, or a generative model of programs corresponding to possible tasks. Similar approaches for inducing curricula via competitive dynamics hold promise for improving large generative models. For example, a recent work shows that it is possible to “red team” a target language model: that is, find adversarial inputs to the target model that cause it to output offensive or otherwise undesirable outputs. Such a method could be folded into an online training process, whereby the target model is progressively trained to correct its behavior on these automatically discovered adversarial inputs.
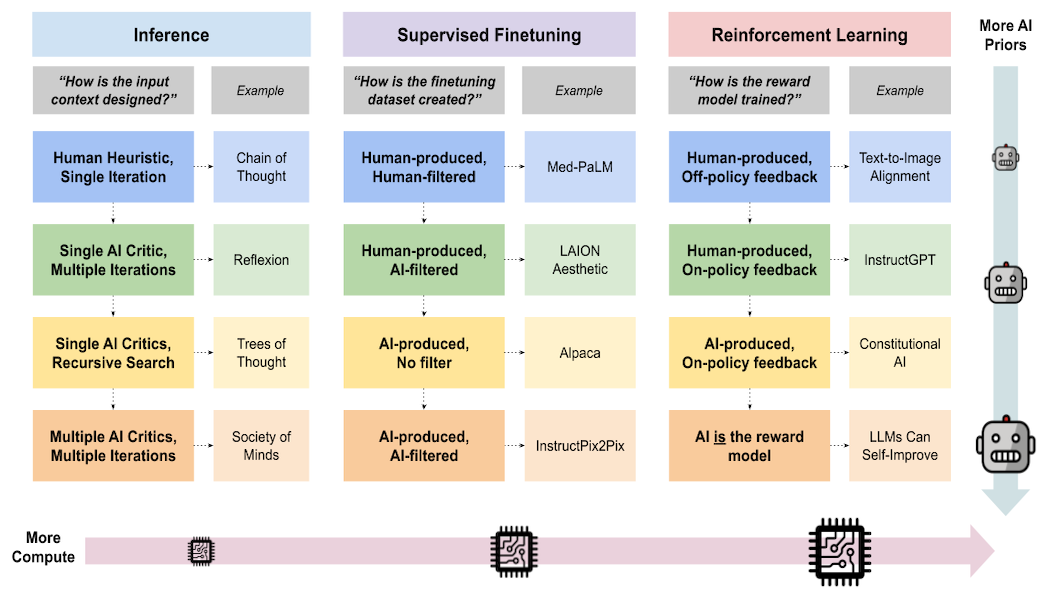
Generative models: Transformer and diffusion models, like the DreamFusion model that generated the synthetic 3D data above, have revolutionized our ability to model complex, Internet-scale data distributions. Such generative models can serve as world models, continually updated with real world data, and sampled as an open-ended data generator. A special case of this pattern is the particularly striking, recent finding that large language models (LLMs) can self-improve by training on their own generated outputs, when their outputs are filtered against some measure of data quality. Remarkably, this approach can even allow LLMs to teach themselves how to use new tools, as demonstrated by Toolformer.
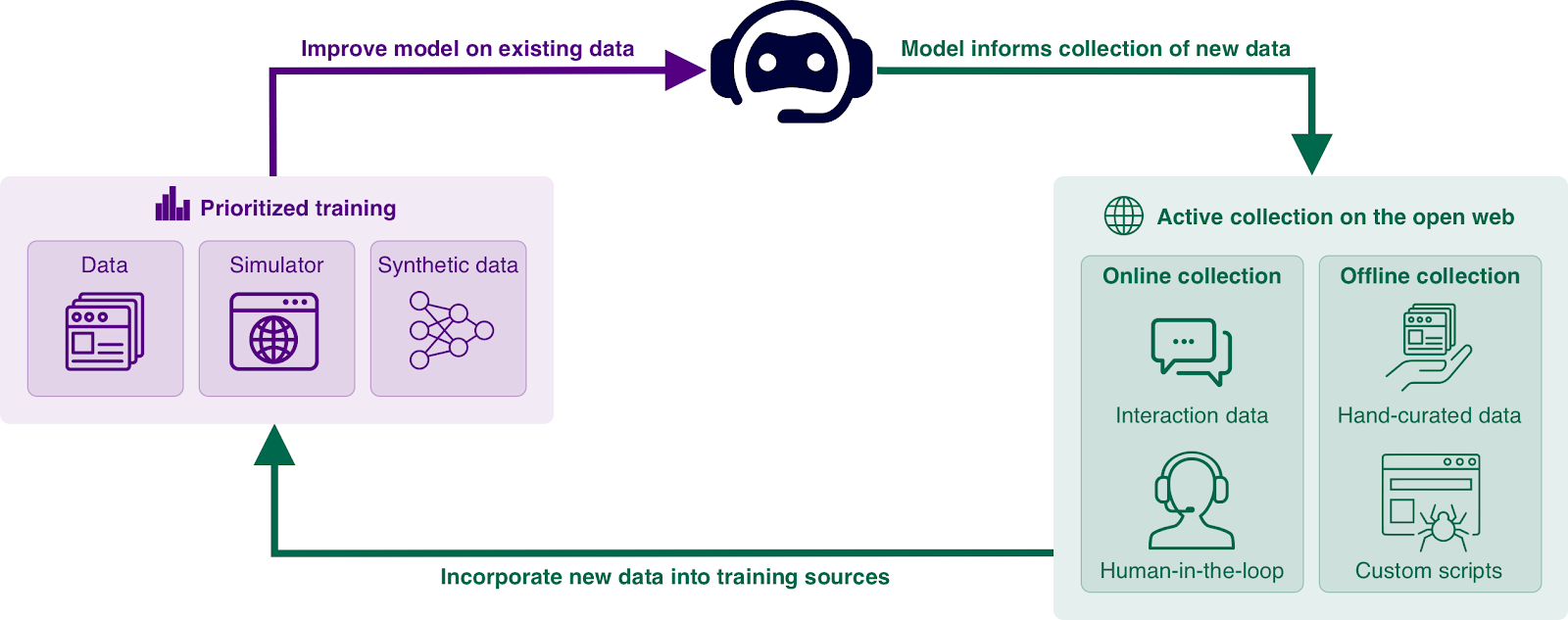
Human-in-the-loop interfaces: Human guidance will likely play a crucial role in ensuring Software² systems remain grounded to the kinds of tasks we want our IGIs to perform. Works like InstructGPT, Dynabench, Aesthetic Bot, and GriddlyJS demonstrate promising approaches for incorporating human preference and expertise into the training loop. Most importantly, high-scale AI systems like ChatGPT and StableDiffusion are now deployed on the web and interacting with hundreds of millions of users. These interactions provide an effectively endless firehose of open-ended training data to improve the capabilities of these models. While these systems remain constrained in the scope of their abilities (e.g. ChatGPT cannot yet take actions outside of its limited text prompt on behalf of the user), they provide a preview of more advanced IGI systems to come.
Summoning an IGI
What might a real world implementation of Software² look like? As a simple example, imagine a virtual assistant that can fully access the web by controlling a browser, including accessing chat interfaces to communicate with people. Most tasks of interest to humans, from scheduling meetings to ordering groceries, can already be performed through a web-based intermediary—think a web app or on-demand service. The set of such tasks on the web, of course, is continually growing larger, as people continue to build new websites and invent new kinds of activities. This virtual assistant can then, in principle, become an IGI, learning to perform an increasingly general set of tasks via the web.
We can apply the principles of Software² to train this virtual assistant through generalized exploration over the space of data-generating programs grounded to the web domain—in this case, specific websites. Much of this training can occur inside a procedurally-generated simulator or world model of web pages that is continually updated through a combination of the virtual assistant’s own experiences on the real web and specific web pages that we, as the system designer, deem particularly important for training. Moreover, exploration might actively search for data in the form of demonstrations from websites like YouTube, used to both improve the assistant’s own decision-making and inform the simulator or world model used to generate synthetic data for training. As usual, the virtual assistant can also directly train on its own experiences navigating the real web. Over time, we can expect such a learning system to produce an ever more capable virtual assistant and the exploration process to gradually encompass wider reaches of the space of websites as it continually seeks websites from which the virtual assistant can learn new things. At a high level, we can expect Software² systems to resemble a large-scale search engine, providing an interface into a powerful model whose core components are continually updated with the assistance of a data-crawling process constantly scouring both the Internet and real world for new and useful information.
As our learning algorithms become ever more powerful, we stand to gain immensely from thinking deeply about what data to feed these algorithms, and how we can design self-instructing systems that produce such data themselves. We are optimistic that, given the relentless growth of the open web and the rapidly maturing components of the Software² stack, we will soon see the realization of widely useful IGIs much like the one just described.
This brief article painted the broad strokes of Software², a quickly emerging, data-centric paradigm for developing self-improving programs based on modern deep learning. It is an approach that is likely to be as influential to the design of future software systems as the recent, ongoing transition to 2.0 and beyond. Still, we have only scratched the surface. If these ideas pique your interest, you might enjoy reading the extended discussion in our full position paper.
Thanks to Edward Grefenstette, Tim Rocktäschel, and Peter Zakin for their insightful comments on drafts of this article.
1. To our knowledge, the term “data sponge” was first coined in Eric Jang’s excellent article, “Just Ask for Generalization.” https://evjang.com/2021/10/23/generalization.html.
2. The recent StableDiffusion model effectively compresses approximately 100GB of training data into a mere 2GB of model weights.
3. Likewise, the LLaMA 7B parameter model can be seen as performing a noisy compression of nearly 5 TB of training data into a model coming in at just under 4GB.
4. As an example, different choices of base lead to an infinite number of programs that yield different results when evaluating arithmetic expressions like 2 + 2. Training a model to learn to solve random samples of such expressions under varying bases would be ineffective. However, such programs can be made mutually consistent and learning, tractable, if the model receives the choice of base as input.
Minqi Jiang is a researcher at FAIR, Meta AI and final-year PhD student at UCL DARK, where he is advised by Prof. Tim Rocktäschel and Prof. Edward Grefenstette. Currently, he is also a visiting researcher at the Foerster Lab for AI Reseach (FLAIR) at the University of Oxford. He is primarily interested in the design of machine learning systems that continually self-improve through actively generating or collecting training data. His work has primarily focused on such systems in the setting of deep reinforcement learning. Previously, he was a product manager at Google and later founded a startup focused on human-in-the-loop automation that was acquired.
Citation
For attribution in academic contexts, please cite this work as
BibTeX citation:
author = {Jiang, Minqi},
title = {Software²: A new generation of AIs that become increasingly general by producing their own training data},
journal = {The Gradient},
year = {2023},
howpublished = {\url{https://thegradient.pub/software-squared}},
}
This article is a summary of the ideas discussed in the paper, “General Intelligence Requires Rethinking Exploration,” which can be cited in academic contexts using the following BibTeX:
title={General Intelligence Requires Rethinking Exploration},
author={Jiang, Minqi and Rocktäschel, Tim and Grefenstette, Edward},
journal={arXiv preprint arXiv:2211:07819},year={2022}
}

{kind=link}
{kind=link}
{kind=link}
{kind=link}