
Steering Towards Effective Autonomous Vehicle Policy
Disengagement is a situation when the vehicle returns to manual control or the driver feels the need to take back the wheel from the AV decision system.

I came across this news article a while ago about a man dozing off at the wheel after switching his Tesla to autonomous mode, and being criminally charged soon after because the vehicle was speeding unbeknownst to him. A quick search revealed several such reports on drivers being charged for unlawful practices in semi-autonomous vehicles.
This got me thinking: how will traffic laws change as we slowly enter the autonomous vehicle era, and in general, the AI-driven 21st century? Most importantly, this brings up the question of whom to blame when dealing with adverse human-robot interactions. These aren’t new questions – only questions to which new perspectives can continually be added until a final course of action is decided. While I actively try to avoid the philosophical and ethical underpinnings of the matter, I will cover the current progress in autonomous vehicle technology, trends and limitations of today’s autonomous vehicle policy, and possible directions to better facilitate the transition to autonomous vehicles around the globe.
Table of Contents
Current State of Autonomous Vehicles
The last decade or so has been a very exciting time in the self-driving vehicle space. Since the invention of better, more efficient Computer Vision, Object Detection, Signal Processing, and Sensor Fusion algorithms, as well as hardware to run said models, a lot more organisations are jumping into this lucrative yet hurdled area of research. Established technology companies, startups, and academic institutions are now in a never-ending rat race to build safe, increasingly convenient vehicles, with more of such entities joining by the week.
Industry
Tesla, with its notable Autopilot feature, is currently the leading SAE Level 2 AV firm out there. Even the Valley's top technology companies – like Google’s Waymo, Amazon’s Zoox, Lyft’s Level 5, and General Motor’s Cruise, to name a few – are at loggerheads on who is going to win the AV lottery given the steep pace of development. We have also observed relatively new and old players joining and exiting the field regularly given how fierce the competition is.
Scarcity of self-driving talent is another concern clouding the field. It is no surprise that top executives are being poached by self-driving firms, with technology companies offering top compensations and entire engineering floors to build reliable, safe, and deployable AV fleets. Investors are also on the lookout for fresh, new entrants, pouring millions in capital into this high-risk-high-reward industry. Famed academics are also starting their own self-driving car spin-offs, claiming to have the secret sauce. Acquisitions are also a popular occurrence in the field, with Deep Learning and Hardware companies looking out to acquire the latest-and-greatest “youngling” AV firms with cutting-edge ideas.
While a lot of AV action is taking place in North America, Asia is seeing its fair share of AV startups popping up. While some companies introduce new technology, others have been classified as copies of their American counterparts. Even cheaper AV components (like LIDAR technology, most famously produced by Velodyne) have started being manufactured in China.
Academia
While the industry has its own set of problems to tackle, academia has long since joined in on the fun. Interest groups and clubs from leading universities and educational institutions are now actively looking into self-driving technology, from autonomously drifting DeLoreans at Stanford, to safer vision systems from Princeton that are less prone to adversarial attacks.
Some universities collaborate directly with automakers, setting up labs and facilities on campus to attract top, varsity tech talent. These labs and student-led initiatives are famous for winning AV competitions, walking out with massive cash prizes and investments from car manufacturers looking to break into AVs.
Some universities like Nanyang Technological University (NTU), Singapore, have dedicated AV testing environments on campus to simulate real-life road conditions. These environments come with sharp turns, curbs, pedestrian cutouts, random obstacles – you name it. Likewise, NTU, with other institutions like the National University of Singapore (NUS) are introducing self-driving commuter buses to ferry students and visitors across campus.


AV Policy Is Slowly Evolving
The ultimate goal has always been to build AV fleets that are scalable, deployable, and safe. The community hopes to reach better-than-human performance on the road regardless of physical conditions or environment. Well, how safe is safe? It’s a highly subjective metric without any clear benchmarking. While avoiding obstacles, following traffic laws, and looking out for pedestrians sound simple, the complexities occur when vehicles find themselves in novel situations never encountered during training, that a human could easily navigate. A common observation is AV rollouts being called back or delayed due to sudden faults or accidents. GM’s Cruise, Uber, and Waymo have all seen call-backs months before an estimated launch.
It’s also not feasible to have a single driving system in place to be used worldwide as the accepted level of safety varies from state to state, nation to nation. This aligns closely with policies around the world holding AV firms by a fine leash. Understandably so, though – most legislations clearly flesh out the scope of “Autonomous Vehicles” or “Automated Driving Systems” in context of existing traffic laws to avoid ambiguity. The same policies then provide situations when users must disengage, and AV case studies from other jurisdictions worldwide. Some legislations even offer concrete technical specifications that have to be met pre-approval.
AV Policy Around the World
Around the world, the state of driverless vehicles hasn’t seen great change. For the past few years, the use of AVs has been on an authorisation basis from local transport and governing agencies. Special permits need to be requested with a lot of red tape and paperwork to preserve pedestrian safety and mitigate/minimise potential damage.
So far, AVs have been welcomed, but with caution, in developing countries with well-endowed transport infrastructure – though, some at a slower pace than others. This includes very few countries in Asia, certain states in the US, and select countries in Europe. Here is an objective look at what a few cities and countries around the globe are offering AV firms for testing:
United States of America
The leading authority over the entrance of automated vehicles in the USA is the National Highway Traffic Safety Administration (NHTSA). They have published circulars over the years suggesting guidelines on how the States can go about crafting laws and regulations around the matter. As such, the States are free to devise rules accordingly despite having NHTSA as the central figurehead. Each State has its respective Department of Motor Vehicles (DMV) or transport authority. While there are manymay more states that have allowed AVs on streets, I focus on California, New York, and Florida to show the disparity in levels of acceptance and legalisation.
New York is reported to have a very slow rollout of AVs. Only Audi and Cadillac signed permits with the State’s DMV. New York is reported to be using archaic AV policies that do not benefit AV firms. The State mandates all AVs to be escorted by police vehicles as means of sufficient damage response with high hourly rates and a $5M insurance to test on select roads only. New York also mandates at least one hand being on the wheel at all times for safety reasons, discouraging AV efforts in the direction of “all-hands-off” riding. Other states have allowed for “no-hands” driving, setting back New York by a large mile in terms of AV policy progress.
On the other hand, the State of California is controlled by the California DMV. California, like most other States, practices permit-based testing of AVs on roads. From the hard numbers, very few AV firms and technology companies have the permits, possibly showing how strict permit control iscontrol over who gets the permit. There are two modes firms can opt for: “With Driver” and “Driverless”. Both of these modes require the firm to fill up and submit an Annual Disengagement Report form asking for details such as VIN, vehicle type, and total disengagements due January every year.
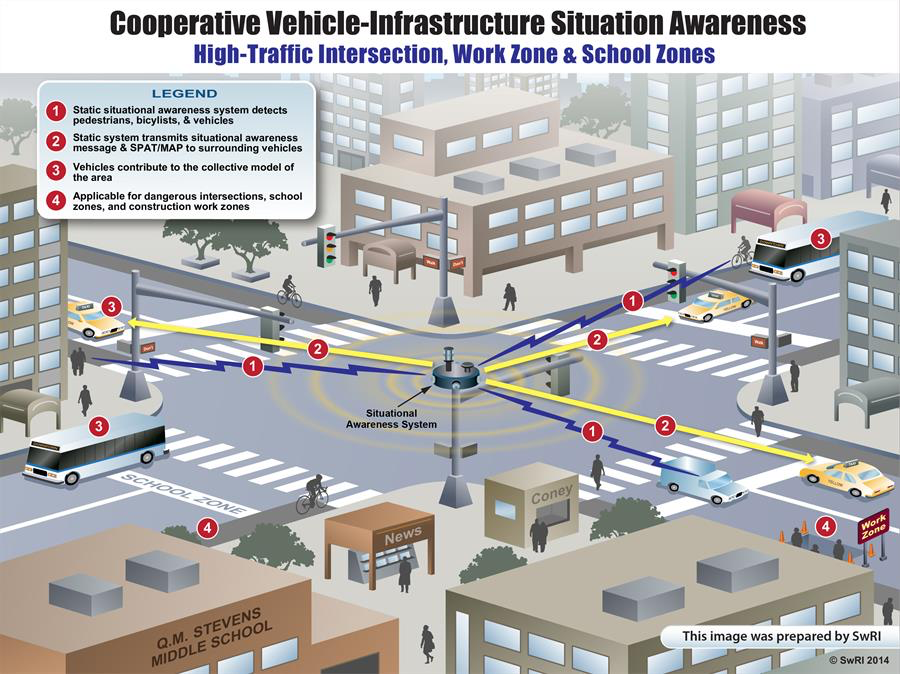
Finally, Florida offers a great range of flexibility to AV firms. The state allows vehicles to run around the city regardless of the driver being present or not. No extra regulations or police escorts are imposed on AV firms and owners either. Unlike California that mandates owners to have special AV licenses, a simple drivers’ license is enough to use an AV on public streets in Florida. Furthermore, the Florida Department of Transportation (FDOT) even categorises different AV fleet design paradigms for communication and information sharing: vehicle-to-vehicle, vehicle-to-infrastructure, and infrastructure-to-vehicle. FDOT suggests constructing centralised awareness systems in place along busy/dangerous roadsides that monitor traffic patterns and relay it to vehicles and back. It’s akin to a watch tower that feeds and collects real-time information from its vicinity to allow AVs to make more informed decisions from fields-of-view they cannot consider themselves.
Asia
Asian countries have their respective stringent rules and regulations around AVs but seem to be significantly more open to issuing permits for testing.
Singapore’s AV policies are directly set by the government under the Road Safety Act. Like most other nations, she operates via permits and licenses. The extensive application to test AVs on public roads isn’t uncommon – it asks for make and model, all modifications done to a traditional vehicle (if any), safety check documents, and in-depth descriptions of purpose, objective, SOP, methods, and geographical area used for testing. It’s a lot of paperwork and administrative detail to ensure no stone is left unturned when testing AVs.
South Korea is seeing lots of progress having legalised Level 3 AVs on public streets from July 2020. Aside from specialised geographical regions set up for AV testing, the South Korean government also allows drivers from riding their AVs on certain public roads with a “self-driving vehicle section” in an effort to promote and proliferate AV usage. In 2019, Korea passed the Act on Promotion and Support of Commercialization of Autonomous Vehicles (AVA) that hopes to provide and facilitate the move towards an autonomous future while also prioritising the use of regular motor vehicles. As South Korea is one of the largest car manufacturing economies, there may be an incentive to continue innovating in hopes of being the “self-driving car hub” of Asia.
United Kingdom
The UK Government has split its AV rollout policies into three stages across 2018 and 2021, where focus groups are continually consulted with different outcomes each. The most recent stage ended in March 2021 and the consensus, documented in an official document named Consultation Paper 3 (CP3), was to develop new standards for safe AV deployment and criminal liabilities for misuse. CP3 documents what “user-in-charge” means and in what conditions when disengagement should take place. The UK Government has introduced a scheme for “individual vehicle approval” where vehicles are inspected by the Driver and Vehicle Standards Agency to verify technical and safety requirements in Great Britain. However, the UK Government has limited the number of AVs that can be approved annually.
Rest of Europe
For Europe, I focus on Netherlands and Germany as they have explicit and well-published laws governing the use of AVs. Though, other countries in the EU are definitely catching up. So far, while companies are allowed to test AVs on streets, there’s scarce information at the individual level on how to get an AV license.
Since July 2015, the Netherlands Vehicle Authority (RDW) has legalised the testing of Connected Automated Vehicles (i.e., AVs) on public roads. Companies can file for permits by filling in an e-application, titled “Admittance procedure for Connected Automated Vehicles”, that’s straightforward and expects informations on the entity (company) carrying out the testing, a plan of approach (SOP and test plan), and other miscellaneous high- and low-level details about the vehicle. RDW expects companies to pay for the application fee, cost of test operations, and can even rent out the RDW Lelystad test center. As mentioned, no clearcut information has been provided on eligibility of individuals who or wish to own AVs, in terms of permits.

Most clauses in Germany’s Road Traffic Act (named “Strassenverkehrsgesetz”) outline clear protocols on liability in case of AV-related damage on public roads. The law further declares that approval must be given by third-party testers. The main difference between the United Kingdom and Germany is that the UK defines the “driver” as the automated system, not the actual human user/owner of vehicle, while Germany defines “driver” as the human user even when the AV engaged. In terms of AV permits or licenses, most of the information online talks about companies being able to publicly test AVs and not on individual ownership and usage of such vehicles.
A Long Way To Go
It’s evident that the industry is plagued with high skepticism from outsiders. There’s no doubt that governments are and will remain wary of AVs. The restrictive permits, long waiting times for acceptance, and conflicting laws remain high barriers to entry for those wanting to enter the business. Ultimately, it’s about the optics of the situation – any haste or unconsidered decision here will definitely damage the reputation of AV firms carefully building and planning next steps through the years. It makes no sense to unify all AV traffic laws because liabilities and contexts wildly vary between cities and countries.
Steering in the Right Direction
Here, I suggest possible directions the self-driving community can head in to ensure the smooth transition into a driverless future. This list is non-exhaustive and can be viewed from different moral, ethical, and technological lenses.
More Granular Evaluation Metrics
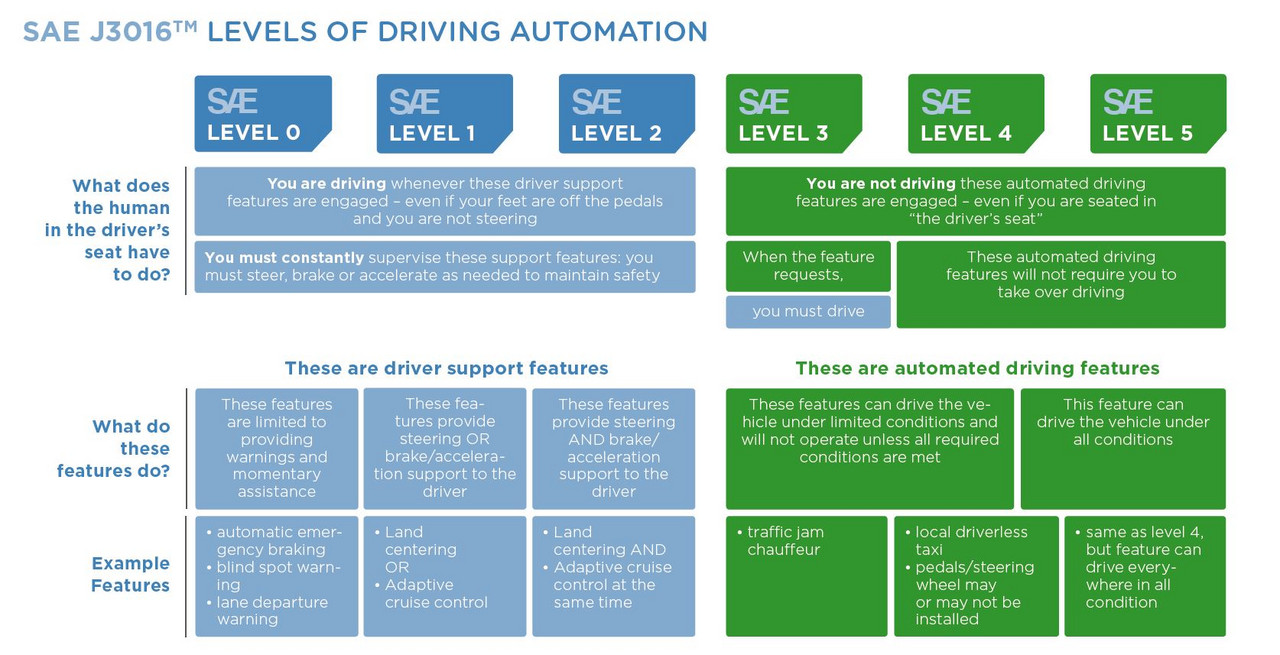
Currently, there are two major public-facing metrics when dealing with self-driving systems: 1) the 5 SAE Levels and 2) Disengagement vs. total miles driven. While the latter tells us the distance traveled, it does not indicate the physical conditions the vehicle was tested in. As described above, many local governing bodies use Disengagement as a metric for evaluating whether an AV is road-safe and deployable.
1/7 We appreciate what the California DMV was trying to do when creating this requirement, but the disengagement metric does not provide relevant insights into the capabilities of the Waymo Driver or distinguish its performance from others in the self-driving space.
— Waymo (@Waymo) February 26, 2020
Driving long distances without many disengagements in a relatively simpler environment would be much easier than riding without frequent disengagements in adverse conditions (like rain, hail, snow, fog, etc.). Though, most metrics used for AVs are subjective based on the ability of real-life environments mimicking what is described by the metric. This results in a situation where the AV is overpromising and under-delivering in terms of usage abilities in extreme conditions. To combat this, I believe the 5 SAE Levels can be made more granular and nuanced to capture the types, settings, and environments the vehicles are driven in. Even better would be to have an entirely new metric or level-wise indication of an AV's true capabilities. These new metrics should come with strong evaluation methods to verify a AV’s true ability to achieve said benchmark (like real-life simulations of adverse conditions in dedicated contained environments, for instance).
Additionally, government-requested information about AV experiments could be open-sourced by the respective firms to add another layer of transparency, hopefully improving the state of public trust in commercial driverless vehicles.
Setting Up An International Regulatory Body
AV policies vary heavily based on governing bodies, prevailing physical conditions in the area of jurisdiction, and the general flexibility of city-wide infrastructure. As such, besides the Society of Automotive Engineers (SAE), there is no other central presiding body in charge of crafting AV policies. If setting up such a body is resource-intensive, sub-units can be set up within the SAE or local governments that work closely with international governing bodies, local transport authorities, and drivers. These teams would be held responsible for crafting guidelines, regulations, and by-laws to ensure the frictionless assimilation and adoption of self-driving vehicles in cities. I foresee this body regulating the issue of licenses for those interested in purchasing and using self-driving vehicles. Aside from a regular driver’s license, another possibility is issuing additional licenses or legal documentation meant for AV owners only.
Improving Transport Infrastructure
Cities are more or less set in stone and changing them to accommodate a fraction of vehicles in the short term seems fiscally and capitally daunting to local and regional administrations. Presently, the community views the AV manufacturing process as a “backward compatibility” task: it hopes to build seemingly-futuristic vehicles to be used on an archaic system of streets, lanes, and avenues that mainly cater to regular vehicles. Up-and-coming smart cities must anticipate what it takes to accommodate self-driving vehicles alongside regular vehicles. This includes building specialised lanes, clear roadside demarcations, and specialised symbols that can be understood by these AV decision-making systems; I envision these demarcations and symbols would come from the aforementioned international AV regulatory body, if not for the local transport authority.
(a) cities can provide dedicated self-driving car lanes in high congestion areas. Lane markers, sensors, etc. Can prescribe which low-occupancy roads are permitted without dedicated lanes.
— Mark Riedl is Non-Fungible (@mark_riedl) July 15, 2019
This means self-driving cars won’t need level-4 autonomy.
Centralised Support For Vehicle Health
What will a driverless future look like in terms of support for vehicle owners? How will fixes, part replacements, and general vehicle maintenance take place? There is a possibility of the mechanic industry sunsetting as a result of AV giants setting up centralised (local and/or regional) support hubs specialising in auto repair and vehicle health checks, both in hardware and software, for the respective makes and models. I foresee existing mechanics taking specialised courses to stay relevant and up-to-date with the pace of AVs dominating the streets; this could be attempts at joining the support crew at these support hubs or starting their own shops offering multi-brand repair services.
For software related issues and glitches in systems (though, in the future, I’m sure we’ll see lesser of that), I believe visiting these hubs would be the best option given the intricacy that goes into fixing AV software bugs. For hardware issues, AV manufacturers like Tesla could sell pre-packed “plug-and-play” components like chips, sensors, and specialised silicon to dealers and unaffiliated mechanics (in the same vein that Apple has external retailers to sell Apple-built silicon).
Will auto mechanics of the future need to know how to diagnose train / test mismatch errors?
— Eric Jang 🇺🇸🇹🇼 (@ericjang11) January 16, 2021
Government Supervision
When upper-level self-driving vehicles become ubiquitous, transport agencies, seeking the counsel of international AV regulators, will have to provide refined guidelines for when drivers can perform other tasks when the vehicle is driving itself. AV manufacturers are better suited to provide details on when drivers can go hands-off. Though, what happens when AV firms say drivens can do other tasks, but governments disagree? Moreover, how will governing bodies perform regular checks on driverless vehicles? How should a possible AV rollout be conducted in growing cities undergoing modernisation? These are some questions the community has to jointly answer and settle upon, before any middle ground can be found, and progress can be made in AV policy.
Better Vehicle Security
With the rise in autonomous network-connected vehicle fleets, there have been concerns of AVs being hacked by adversaries. As of now, AVs are singular units connected to a central network (usually monitored by the AV firm during public testing). In the best case scenario, AVs should be isolated boxes capable of making decisions internally without external counsel. This minimises the chance of having a single point of collective failure. AV cybersecurity also brings with it the emergence of a new wave of cyber crimes related to AV hacking and hijacking. When hacked AVs do get into accidents or cause harm, the fault is either tracked back to the rider/owner or the AV firm. If hackers leave no trace of tampering, it again brings up the issue of whom to blame in adverse situations, leading to false arrests or wrongful charges on AV firms or owners.
The Ethical Dilemmas
Citizens, skeptics, and ethicists have brought up concerns when it comes to AV testing in cities. There are questions being raised on not being able to opt out of AV beta tests and consentless data collection efforts. As much as I try to avoid it here, the evergreen issue of “who will the vehicle choose to save” will remain unanswered until humans, especially the authorities and experts, decide what such driverless vehicles should do in rare cases; simulations can be constructed but it is impossible to foresee all possible scenarios. When accidents do occur, I belive the community will more likely blame the AV manufacturers of the vehicles in question rather than any other parties involved. Another common concern is the loss of a driver’s license in cases where an owner’s car collides with a pedestrian while in autonomous mode.
How can I opt out when other people decide to beta test full self-driving on the same roads that I drive on? pic.twitter.com/xBxdwW8jFX
— Mark Riedl is Non-Fungible (@mark_riedl) March 7, 2021
I feel it is futile to debate about whom to blame in adverse human-AV disasters: the human trusting a machine that was portrayed to do well in almost all situations, or the machine that morally/ethically cannot tell the difference between its decisions. This adds more layers of nuance and complexity that need to be carefully unpacked before having a final say in the issue; I’m sure these answers and hot-takes will change with time as well, as has been done when there are conflicting schools of thought surrounding these matters of “AI influencing the future and the way humans live”.
Now that AV firms own the car fleets, and not the users or pedestrians, the locations of the AVs, and by association, the customers’ locations, are being tracked constantly. A dilemma is encountered: does the local authority allow AV firms to constantly monitor location data of AVs with passengers inside for safety reasons or do we respect the privacy of passengers, thereby defaulting on safety? The rise in commercial AVs will definitely bring about new privacy laws related to AV safety (maybe weaved into existing policies like the European Union’s GDPR). Penalties such as fines work in the interim but should ideally not be the primary deterrent when privacy is broached.
What Next?
Despite the skepticism, AVs are coming – and fast, at that. Though, I believe the community should avoid hyping up the field excessively. This places false expectations on parties both in and out of the field, resulting in prioritising rolling out quickly compared to effectively carrying out the checks and balances on the vehicles before making any claims on road safety and deployability. Together, communities around the world will transition into minimal accident environments, thereby increasing efficiency and productivity, cutting traffic jams, and minimising road rage. Hopefully, we’ll have figured out better ways of handling situations when AVs do cause harm owing to better metrics, standards, and laws set in place by governing bodies collaborating with AV manufacturers.
To see progress, governments and AV firms must join forces to draft these better standards of when and when not to perform certain actions behind the wheel – like a set list of allowed AV behaviours. Presently, there’s an uneven power dynamic with governments strong-arming firms when the slightest of damage is caused; justified, though, given the relative nascency of the field. Another possibility we have to accept is a future where not all vehicles are self-driving. There may be a diverse mix of AVs and non-AVs on the road at all times. If AVs do become ubiquitous, we may see a lot of change in the way cities of the future are planned and constructed, traffic laws are devised and enacted, motor insurance transactions are performed, and more.
Given how strict control over driverless vehicles is, will there ever be a possibility of living like the Jetsons where passengers are free to do anything while commuting? Or will drivers and riders have to be alert at all times? This responsibility should be addressed jointly by governments and AV manufacturers. Most often, when a specific AI system is ready for the world, the world may not be ready for the AI system. The differences in pace is usually the leading cause for why technology fails to become well-propagated in society or why frequent rollout delays hit.
Ultimately, these concerns need to be tackled before we see any real progress.
Writer Profile
Rishabh Anand is an undergraduate researcher and Computer Science student at the National University of Singapore (NUS). His main areas of focus are Graph Deep Learning, Deep Reinforcement Learning, and AI policy, specifically their intersections and applications. He is an active open-source software contributor for ML wrappers, and avid technical writer on AI and technology in general. For more updates, follow him on Twitter @rishabh16_.
Citation
For attribution in academic contexts or books, please cite this work as
Rishabh Anand, "Engaging with Disengagement", The Gradient, 2021.
BibTeX citation:
@article{anand2022engaging,
author = {Anand, Rishabh},
title = {Engaging with Disengagement},
journal = {The Gradient},
year = {2022},
howpublished = {\url{https://thegradient.pub/engaging-with-disengagement} },
}



{kind=link}
{kind=link}
{kind=link}
{kind=link}